\(\renewcommand\AA{\unicode{x212B}}\)
RotateInstrumentComponent dialog.
Table of Contents
| Name | Direction | Type | Default | Description |
|---|---|---|---|---|
| Workspace | InOut | Workspace | Mandatory | The name of the workspace for which the new instrument configuration will have an effect. Any other workspaces stored in the analysis data service will be unaffected. |
| ComponentName | Input | string | The name of the component to rotate. Component names are defined in the instrument definition files. | |
| DetectorID | Input | number | -1 | The ID of the detector to rotate. If both the component name and the detector ID are set the latter will be used. |
| X | Input | number | 0 | The x-part of the rotation axis. |
| Y | Input | number | 0 | The y-part of the rotation axis. |
| Z | Input | number | 0 | The z-part of the rotation axis. |
| Angle | Input | number | 0 | The angle of rotation in degrees. |
| RelativeRotation | Input | boolean | True | The property defining how the rotation should be interpreted. If true it is a relative rotation. Otherwise it is an absolute rotation. |
RotateInstrumentComponent rotates a component around an axis of rotation by an angle given in degrees. Rotation by 0 degrees does not change the component’s orientation. The rotation axis (X,Y,Z) must be given in the co-ordinate system attached to the component and rotates with it. The centre of rotation is the centre of the component to be rotated, and any children of that component (such as detectors in a bank, or pixels in a tube) are moved and rotated along with the component.
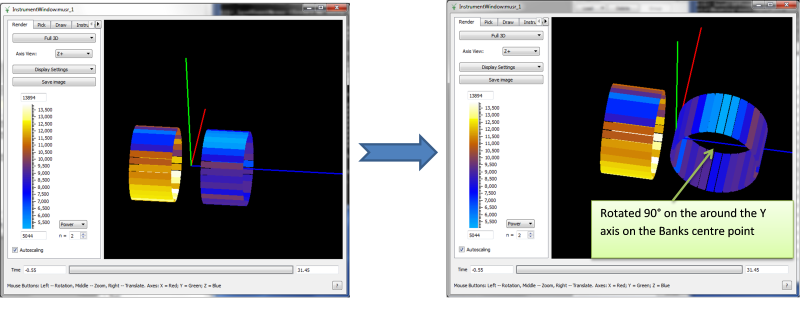
Rotating a bank around the 90° round Y Axis. The centre of rotation is the centre of the component to be rotated, and any children of that component (such as each detector in this instance) are moved and rotated along with the bank.
# Load a MUSR file
musr = Load('MUSR00015189')
# and use the first workspace in the workspace group
ws = mtd['musr_1']
def pos3D_as_str(pos, digits=6):
""" Produces a string with a V3D position (x, y, z) from a V3D object,
using a fixed limited number of digits (for robust string comparisons).
"""
def nz(value):
""" Handles potential issues with +-0 (for 6 digits text output) """
return 0.0 if abs(value) < 1e-7 else value
precision = str(digits)
format_str = '[{0:.'+precision+'f}, {1:.'+precision+'f}, {2:.'+precision+'f}]'
result = format_str.format(nz(pos.getX()), nz(pos.getY()), nz(pos.getZ()))
return result
print('Original positions of detectors 1 and 2')
opos1 = ws.getInstrument().getDetector(1).getPos()
opos2 = ws.getInstrument().getDetector(2).getPos()
print('Det 1: {0}'.format(pos3D_as_str(opos1)))
print('Det 2: {0}'.format(pos3D_as_str(opos2)))
# Rotate bank 'back' around the Z axis by 90
RotateInstrumentComponent( ws, ComponentName='back', X=0,Y=1,Z=0, Angle=90.0 )
print('Positions of detectors 1 and 2 after rotation')
pos1 = ws.getInstrument().getDetector(1).getPos()
pos2 = ws.getInstrument().getDetector(2).getPos()
print('Det 1: {0}'.format(pos3D_as_str(pos1)))
print('Det 2: {0}'.format(pos3D_as_str(pos2)))
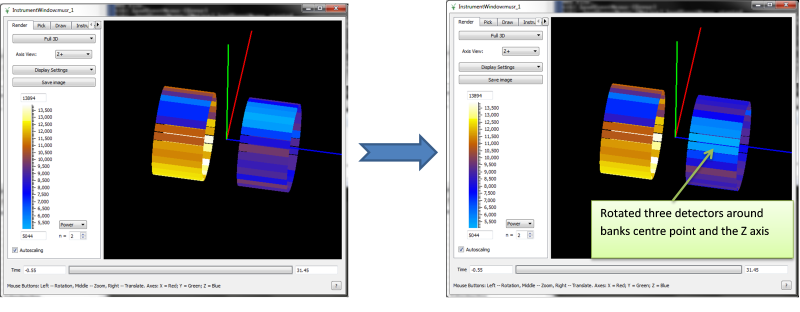
Rotating the bank around the Z Axis. The centre of rotation is the centre of the bank, so the detectors are translated and rotated to match.
# Load a MUSR file
musr = Load('MUSR00015189')
# and use the first workspace in the workspace group
ws = mtd['musr_1']
def pos3D_as_str(pos, digits=6):
""" Produces a string with a V3D position (x, y, z) from a V3D object,
using a fixed limited number of digits (for robust string comparisons).
"""
def nz(value):
""" Handles potential issues with +-0 (for 6 digits text output) """
return 0.0 if abs(value) < 1e-7 else value
precision = str(digits)
format_str = '[{0:.'+precision+'f}, {1:.'+precision+'f}, {2:.'+precision+'f}]'
result = format_str.format(nz(pos.getX()), nz(pos.getY()), nz(pos.getZ()))
return result
print('Original positions of detectors 1 and 4')
opos1 = ws.getInstrument().getDetector(1).getPos()
opos4 = ws.getInstrument().getDetector(4).getPos()
print('Det 1: {0}'.format(pos3D_as_str(opos1)))
print('Det 4: {0}'.format(pos3D_as_str(opos4)))
# Rotate bank 'back' around the Z axis by 3 detectors.
RotateInstrumentComponent( ws, ComponentName='back', X=0,Y=0,Z=1, Angle=3*360.0 / 32 )
print('Positions of detector 1 after rotation')
pos1 = ws.getInstrument().getDetector(1).getPos()
print('Det 1: {0}'.format(pos3D_as_str(pos1)))
print('Detector 1 took place of detector 4')
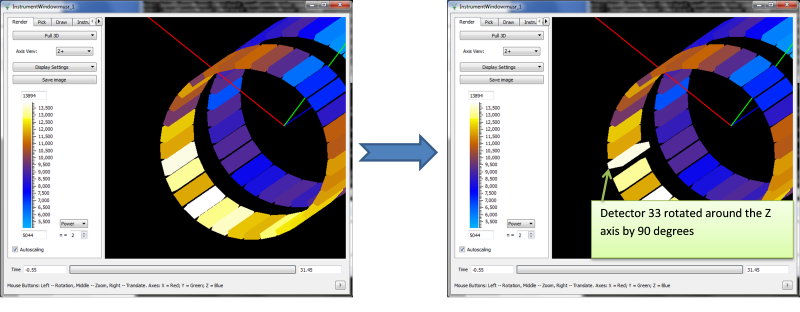
Rotating the detector around the Z Axis by 90 degrees. The centre of rotation is the centre of the detector.
import numpy as np
# Load a MUSR file
musr = Load('MUSR00015189')
# and use the first workspace in the workspace group
ws = mtd['musr_1']
# Rotating a detector doesn't change its position, just its orientation
# Original position of detector 33
print(ws.getInstrument().getDetector(33).getPos())
# Caclulate the solid angles for all detectors in the instrument
# The result is a single-bin workspace with solid angles for all spectra in ws
saws = SolidAngle( ws )
# Collect the solid angles from the first bin in saws and save them in numpy array.
# Numpy module makes it easy to manipulate arrays
sa1 = np.array( [ saws.readY(i)[0] for i in range(saws.getNumberHistograms()) ] )
# Rotate detector 33 around the Z axis by 90 degrees.
RotateInstrumentComponent( ws, DetectorID=33, X=0,Y=0,Z=1, Angle=90 )
# Check the position of detector 33 stays unchanged
print(ws.getInstrument().getDetector(33).getPos())
# Calculate the solid angles after rotation
saws = SolidAngle( ws )
sa2 = np.array( [ saws.readY(i)[0] for i in range(saws.getNumberHistograms()) ] )
# Take element by element difference of the solid angles
diff = sa2 - sa1
# numpy.set_printoptions is not stable across versions.
# manually print array to ensure consistent display for tests
diff = diff.reshape(8, 8)
diff_as_str = ''
for row in range(8):
for col in range(8):
diff_as_str += '{: .5f} '.format(diff[row][col])
diff_as_str += '\n'
print(diff_as_str)
print('The non-zero difference {:.13f} is due to detector {}'.format(diff[4][0], ws.getDetector(32).getID()))
[0.0888151,-0.108221,-0.145]
[0.0888151,-0.108221,-0.145]
0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
-0.04645 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
The non-zero difference -0.0464531276188 is due to detector 33
Categories: AlgorithmIndex | DataHandling\Instrument
C++ header: RotateInstrumentComponent.h (last modified: 2020-03-20)
C++ source: RotateInstrumentComponent.cpp (last modified: 2020-04-07)